
Description
You are given a network of n nodes, labeled from 1 to n. You are also given times, a list of travel times as directed edges times[i] = (ui, vi, wi), where ui is the source node, vi is the target node, and wi is the time it takes for a signal to travel from source to target.
We will send a signal from a given node k. Return the minimum time it takes for all the n nodes to receive the signal. If it is impossible for all the n nodes to receive the signal, return -1.
Example 1:
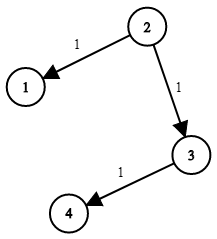
Input: times = [[2,1,1],[2,3,1],[3,4,1]], n = 4, k = 2
Output: 2
Example 2:
Input: times = [[1,2,1]], n = 2, k = 1
Output: 1
Example 3:
Input: times = [[1,2,1]], n = 2, k = 2
Output: -1
Constraints:
1 <= k <= n <= 1001 <= times.length <= 6000times[i].length == 31 <= ui, vi <= nui != vi0 <= wi <= 100- All the pairs
(ui, vi) are unique. (i.e., no multiple edges.)
Solutions
Solution 1: Naive Dijkstra Algorithm
We define g[u][v] to represent the edge weight from node u to node v. If there is no edge between node u and node v, then g[u][v] = +∞.
We maintain an array dist, where dist[i] represents the shortest path length from node k to node i. Initially, we set all dist[i] to +∞, except for dist[k - 1] = 0. We define an array vis, where vis[i] indicates whether node i has been visited. Initially, we set all vis[i] to false.
Each time, we find the unvisited node t with the smallest distance, and then perform relaxation operations centered on node t. For each node j, if dist[j] > dist[t] + g[t][j], we update dist[j] = dist[t] + g[t][j].
Finally, we return the maximum value in dist as the answer. If the answer is +∞, it means there are unreachable nodes, and we return -1.
The time complexity is O(n^2 + m), and the space complexity is O(n^2). Here, n and m are the number of nodes and edges, respectively.
PythonJavaC++GoTypeScript
class Solution:
def networkDelayTime(self, times: List[List[int]], n: int, k: int) -> int:
g = [[inf] * n for _ in range(n)]
for u, v, w in times:
g[u - 1][v - 1] = w
dist = [inf] * n
dist[k - 1] = 0
vis = [False] * n
for _ in range(n):
t = -1
for j in range(n):
if not vis[j] and (t == -1 or dist[t] > dist[j]):
t = j
vis[t] = True
for j in range(n):
dist[j] = min(dist[j], dist[t] + g[t][j])
ans = max(dist)
return -1 if ans == inf else ans(code-box)
class Solution {
public int networkDelayTime(int[][] times, int n, int k) {
int[][] g = new int[n][n];
int[] dist = new int[n];
final int inf = 1 << 29;
Arrays.fill(dist, inf);
for (var e : g) {
Arrays.fill(e, inf);
}
for (var e : times) {
g[e[0] - 1][e[1] - 1] = e[2];
}
dist[k - 1] = 0;
boolean[] vis = new boolean[n];
for (int i = 0; i < n; ++i) {
int t = -1;
for (int j = 0; j < n; ++j) {
if (!vis[j] && (t == -1 || dist[t] > dist[j])) {
t = j;
}
}
vis[t] = true;
for (int j = 0; j < n; ++j) {
dist[j] = Math.min(dist[j], dist[t] + g[t][j]);
}
}
int ans = 0;
for (int x : dist) {
ans = Math.max(ans, x);
}
return ans == inf ? -1 : ans;
}
}(code-box)
class Solution {
public:
int networkDelayTime(vector<vector<int>>& times, int n, int k) {
const int inf = 1 << 29;
vector<vector<int>> g(n, vector<int>(n, inf));
for (const auto& e : times) {
g[e[0] - 1][e[1] - 1] = e[2];
}
vector<int> dist(n, inf);
dist[k - 1] = 0;
vector<bool> vis(n);
for (int i = 0; i < n; ++i) {
int t = -1;
for (int j = 0; j < n; ++j) {
if (!vis[j] && (t == -1 || dist[t] > dist[j])) {
t = j;
}
}
vis[t] = true;
for (int j = 0; j < n; ++j) {
dist[j] = min(dist[j], dist[t] + g[t][j]);
}
}
int ans = ranges::max(dist);
return ans == inf ? -1 : ans;
}
};(code-box)
func networkDelayTime(times [][]int, n int, k int) int {
const inf = 1 << 29
g := make([][]int, n)
for i := range g {
g[i] = make([]int, n)
for j := range g[i] {
g[i][j] = inf
}
}
for _, e := range times {
g[e[0]-1][e[1]-1] = e[2]
}
dist := make([]int, n)
for i := range dist {
dist[i] = inf
}
dist[k-1] = 0
vis := make([]bool, n)
for i := 0; i < n; i++ {
t := -1
for j := 0; j < n; j++ {
if !vis[j] && (t == -1 || dist[t] > dist[j]) {
t = j
}
}
vis[t] = true
for j := 0; j < n; j++ {
dist[j] = min(dist[j], dist[t]+g[t][j])
}
}
if ans := slices.Max(dist); ans != inf {
return ans
}
return -1
}(code-box)
function networkDelayTime(times: number[][], n: number, k: number): number {
const g: number[][] = Array.from({ length: n }, () => Array(n).fill(Infinity));
for (const [u, v, w] of times) {
g[u - 1][v - 1] = w;
}
const dist: number[] = Array(n).fill(Infinity);
dist[k - 1] = 0;
const vis: boolean[] = Array(n).fill(false);
for (let i = 0; i < n; ++i) {
let t = -1;
for (let j = 0; j < n; ++j) {
if (!vis[j] && (t === -1 || dist[j] < dist[t])) {
t = j;
}
}
vis[t] = true;
for (let j = 0; j < n; ++j) {
dist[j] = Math.min(dist[j], dist[t] + g[t][j]);
}
}
const ans = Math.max(...dist);
return ans === Infinity ? -1 : ans;
}(code-box)
Solution 2: Heap-Optimized Dijkstra Algorithm
We can use a priority queue (heap) to optimize the naive Dijkstra algorithm.
We define g[u] to represent all adjacent edges of node u, and dist[u] to represent the shortest path length from node k to node u. Initially, we set all dist[u] to +∞, except for dist[k - 1] = 0.
We define a priority queue pq, where each element is (d, u), representing the distance d from node u to node k. Each time, we take out the node (d, u) with the smallest distance from pq. If d >\textit{dist}[u], we skip this node. Otherwise, we traverse all adjacent edges of nodeu. For each adjacent edge(v, w), if\textit{dist}[v] > \textit{dist}[u] + w, we update\textit{dist}[v] = \textit{dist}[u] + wand add(\textit{dist}[v], v)to\textit{pq}$.
Finally, we return the maximum value in dist as the answer. If the answer is +∞, it means there are unreachable nodes, and we return -1.
The time complexity is O(m × log m + n), and the space complexity is O(n + m). Here, n and m are the number of nodes and edges, respectively.
PythonJavaC++GoTypeScript
class Solution:
def networkDelayTime(self, times: List[List[int]], n: int, k: int) -> int:
g = [[] for _ in range(n)]
for u, v, w in times:
g[u - 1].append((v - 1, w))
dist = [inf] * n
dist[k - 1] = 0
pq = [(0, k - 1)]
while pq:
d, u = heappop(pq)
if d > dist[u]:
continue
for v, w in g[u]:
if (nd := d + w) < dist[v]:
dist[v] = nd
heappush(pq, (nd, v))
ans = max(dist)
return -1 if ans == inf else ans(code-box)
class Solution {
public int networkDelayTime(int[][] times, int n, int k) {
final int inf = 1 << 29;
List<int[]>[] g = new List[n];
Arrays.setAll(g, i -> new ArrayList<>());
for (var e : times) {
g[e[0] - 1].add(new int[] {e[1] - 1, e[2]});
}
int[] dist = new int[n];
Arrays.fill(dist, inf);
dist[k - 1] = 0;
PriorityQueue<int[]> pq = new PriorityQueue<>(Comparator.comparingInt(a -> a[0]));
pq.offer(new int[] {0, k - 1});
while (!pq.isEmpty()) {
var p = pq.poll();
int d = p[0], u = p[1];
if (d > dist[u]) {
continue;
}
for (var e : g[u]) {
int v = e[0], w = e[1];
if (dist[v] > dist[u] + w) {
dist[v] = dist[u] + w;
pq.offer(new int[] {dist[v], v});
}
}
}
int ans = Arrays.stream(dist).max().getAsInt();
return ans == inf ? -1 : ans;
}
}(code-box)
class Solution {
public:
int networkDelayTime(vector<vector<int>>& times, int n, int k) {
const int inf = 1 << 29;
using pii = pair<int, int>;
vector<vector<pii>> g(n);
for (auto& edge : times) {
g[edge[0] - 1].emplace_back(edge[1] - 1, edge[2]);
}
vector<int> dist(n, inf);
dist[k - 1] = 0;
priority_queue<pii, vector<pii>, greater<>> pq;
pq.emplace(0, k - 1);
while (!pq.empty()) {
auto [d, u] = pq.top();
pq.pop();
if (d > dist[u]) {
continue;
}
for (auto& [v, w] : g[u]) {
if (dist[v] > dist[u] + w) {
dist[v] = dist[u] + w;
pq.emplace(dist[v], v);
}
}
}
int ans = ranges::max(dist);
return ans == inf ? -1 : ans;
}
};(code-box)
func networkDelayTime(times [][]int, n int, k int) int {
g := make([][][2]int, n)
for _, e := range times {
u, v, w := e[0]-1, e[1]-1, e[2]
g[u] = append(g[u], [2]int{v, w})
}
dist := make([]int, n)
const inf int = 1 << 29
for i := range dist {
dist[i] = inf
}
dist[k-1] = 0
pq := hp{{0, k - 1}}
for len(pq) > 0 {
p := heap.Pop(&pq).(pair)
d, u := p.x, p.i
if d > dist[u] {
continue
}
for _, e := range g[u] {
v, w := e[0], e[1]
if nd := d + w; nd < dist[v] {
dist[v] = nd
heap.Push(&pq, pair{nd, v})
}
}
}
if ans := slices.Max(dist); ans < inf {
return ans
}
return -1
}
type pair struct{ x, i int }
type hp []pair
func (h hp) Len() int { return len(h) }
func (h hp) Less(i, j int) bool { return h[i].x < h[j].x }
func (h hp) Swap(i, j int) { h[i], h[j] = h[j], h[i] }
func (h *hp) Push(x any) { *h = append(*h, x.(pair)) }
func (h *hp) Pop() (x any) { a := *h; x = a[len(a)-1]; *h = a[:len(a)-1]; return }(code-box)
function networkDelayTime(times: number[][], n: number, k: number): number {
const g: [number, number][][] = Array.from({ length: n }, () => []);
for (const [u, v, w] of times) {
g[u - 1].push([v - 1, w]);
}
const dist: number[] = Array(n).fill(Infinity);
dist[k - 1] = 0;
const pq = new PriorityQueue<number[]>((a, b) => a[0] - b[0]);
pq.enqueue([0, k - 1]);
while (!pq.isEmpty()) {
const [d, u] = pq.dequeue();
if (d > dist[u]) {
continue;
}
for (const [v, w] of g[u]) {
if (dist[v] > dist[u] + w) {
dist[v] = dist[u] + w;
pq.enqueue([dist[v], v]);
}
}
}
const ans = Math.max(...dist);
return ans === Infinity ? -1 : ans;
}(code-box)


